Key Resources
- Textbook: Computational Geometry - Algorithms and Applications
- Coursera Course: For the Problemset and Implementations (Till Part 5)
- Philipp Kindermann’s Lectures Series (Part 6 and Onwards)
- Various Random Resources found on the internet!
Further Reading / Interesting Resources
- ObservableHQ - Infinity and Back Again: Voronoi Diagrams for Infinite Polygons
- Book: Foundations of Multidimensional and Metric Data Structures - Hanen Samet (2006)
- Josh Hug’s Lectures on Multidimensional Data: Good intuition on k-d trees and quad trees.
- TestGen: Voronoi Diagrams and Delaunay Tetrahedralizations for 3D Points. Software
- Generalization of Voronoi Diagrams: Originally from a book on (Geometric Data Structures for Computer Graphics, 2005)
Overview
To learn computational geometry, these are the steps/resources I used,
- Week 1 - Week 5: Coursera - Computational Geometry
- For theory, read from book and/or random resources off the internet. Philipp’s lectures are also available for this.
- Focus on the problemset for the course.
- Recommended Prerequisite: Good understanding and practice of DSA. Some of the problems have tons of edge cases!
- Week 6 - Week 10: Philipp Kindermann’s Lecture Series
- This part is more theory oriented and covers Voronoi Diagrams, Delaunay Triangulations too.
- Again some parts can be followed up from the book as well.
- Recommended Prerequisite: Basic graph theory (maximal planar graph, duals), basic DSA (analyzing time complexity)
General Implementation Aspects
- Use slope pairs
- Triangle orientation check (sign of area)
- Sum of area of triangles to form interior
- Ray out of a point inside intersects polygon odd times
- Check line segment intersections by checking orientation of each of the four points (not two!)
- It also helps to plot sample testcases for debugging
- Modulo to cyclicly iterate through points of a Polygon
- Carefully inspect, input/output format as well as edge cases
// My Header - (Used mostly STL instead of OOP)
#define ll long long
#define x first
#define y second
typedef pair<ll,ll> vertex;
typedef pair<ll,ll> point;
typedef pair<double, double> ppoint;
const ppoint INF_POINT = {2e9, 2e9};
const double EPS = 1e-16;
Week 1
1. Point and Vector (Triangle Sign Check)
This will be used in most future problems as well. The most generalized template is below. Note that area is actually twice the actual area.
int trisign(ppoint a, ppoint b, ppoint pt){
double area = a.x * b.y + b.x * pt.y + pt.x * a.y - a.y * b.x - b.y * pt.x - pt.y * a.x;
if(area > EPS){
return 1;
}else if(area < -EPS){
return -1;
}
return 0;
}
2. Point in Triangle
Principle is the sum of the 3 individual triangles (2 vertices, 1 point) would be equal to total area (3 vertices).
3. Point in Polygon

- Take ray from point to infinity
- Check intersection with each line segment O(N)
- Parity of the number of intersection determine inside(odd) or outside(even)
- Ignore if line segment coincides with the ray.
This is used again in future problems like 4-1/4-2.
Draw a ray from P to INF_POINT. Check the if the no. of intersections are odd or even.
Make sure an endpoint is not counted twice - that’s why semi-open interval is checked (semi_check_intersect).
bool inbetween(ppoint a, ppoint midd, ppoint b){
double minx = min(a.x, b.x);
double miny = min(a.y, b.y);
double maxx = max(a.x, b.x);
double maxy = max(a.y, b.y);
return (minx <= midd.x && midd.x <= maxx) && (miny <= midd.y && midd.y <= maxy);
}
// Only check semi-interval [s1, s2) intersection [d1, d2]
bool semi_check_intersect(ppoint d1, ppoint d2, ppoint s1, ppoint s2){
int s1_side = trisign(d1, d2, s1);
int s2_side = trisign(d1, d2, s2);
int d1_side = trisign(s1, s2, d1);
int d2_side = trisign(s1, s2, d2);
if(s1_side*s2_side == 0 && d1_side*d2_side <= 0){
// If segment lies completely inside we can ignore it; So check if strictly only s1 is present
return (inbetween(d1, s1, d2) && !inbetween(d1, s2, d2));
}else if(s1_side*s2_side <= 0 && d1_side * d2_side <= 0){
return 1;
}
return 0;
}
bool point_in_polygon(vector<vertex>& poly, pair<double, double> p){
int ray_intersects = 0;
int n = (int)poly.size();
for(int k = 0; k < n; ++k){
ray_intersects += semi_check_intersect(p, INF_POINT, poly[k], poly[(k+1) % n]);
}
if(ray_intersects % 2 == 0){
return 0;
}else{
return 1;
}
}
4. Points in Convex Polygon
The steps I used were as follows -
- Get Centroid: Choose 3 non-colinear points (
trisign) - Sort by Angle: Array of pairs
slope_pairswhich stores{atan2(points[i].y - centroid.y, points[i].x - centroid.x), i}and then sort. - Binary Search by Angle (Helper Function):
pair<ll, ll> binsearch_angle(vector<pair<double,ll>>& angle_pair, double angle_val)gives the pair of indices of the two vertices. - Check in triangle: Use the previous part to check if point in the triangle given by
binsearch_angle
Week 2
Convex Hull Algorithms
Graham Scan
- Initialize a pair of points in S
- Add new point
- Check if orientation of (n-2)nd point with ((n-3)rd, nth) point is left(ccw)/right(cw) (and 0)
- Else pop the 2nd last point
Andrew’s (Preferred - NlogN for sort)
- Take line (leftmost or minx) point & (rightmost or maxx) point
- Sort Points in x-coords
- Partition all other points (by orientation) into Lower or Upper according to below/above the partition line. (stable or resort)
- Run Graham Scan and pop 2nd last element if right(for Upper Partition) or left(for Lower Partition)
Points to Note: - Andrew’s Scan can also be thought similar to a sweep line - At every event point(p) check orientation of last point in S(n) wrt to S(n-1) and p - Convex Hull can also be used for other polygons (see Unit Circle’s questions)
- Jarvis March
- Take lowest point in H
- Take 2nd point with smallest polar angle in H
- Take last (n-1) and (n-2) points as line
- Find smallest polar angle point wrt. this line
- Repeat till 1st point is found
1. Convex Polygon Check
Check if polygon is convex. Stable Partition points to upper part and lower part (like Modified Graham’s).
Check (convex_check) if all Up points have no lefts. Check again if all Down points have no rights.
bool convex_check(vector<pair<ll,ll>>& points, int invsign){
ll sz = points.size();
for(int i = 0; i < sz-2; ++i){
// NO Left(>0) if Down, NO Right(<0) if Up
if(trisign(points[i], points[i+2], points[i+1]) == invsign){
return 0;
}
}
return 1;
}
invsign is an integer which is 1 or -1, depending on lower or upper hull.
2. Convex Hull
- Convex hull follows similar to the convex hull check.
- For each vertex, we check
while(hull_size + 1 >= 3) - If
trisign(hull[hull_size - 2], points[i], hull[hull_size -1])matches ourinvsignthen pop the 2nd last vertex, Or else break out of thewhileloop to check the next vertex. - Function Header:
void construct_convex_hull(vector<pair<ll,ll>>& points, vector<pair<ll,ll>>& hull, int invsign); - After
construct_convex_hullfor both partitions, we zip the upper and lower Hulls. Thus forming the CCW convex hull.
3. Tangents to Polygon
See geomalgorithms.com for excellent explaination of technique. As stated, we need sign(left point) != sign(right point) for tangent In our case to find left and right tangents, we can put a condition like this, inside our loop iterating through each point.
int signl = trisign(left_pt, points[i], pt);
int signr = trisign(points[i], right_pt, pt);
if(signl != signr){
// CCW => pt lies L/R wrt. leftpt
if(signl == sign || signr == -sign){
return points[i];
}
}
where sign is given by whether we want left or right tangent.
4. Union of Convex Hulls
Take any point Z inside Convex Polygon A. If Z is also inside B, sort the points by angle and apply graham scan. If Z is not inside B, remove inner chain and apply Graham’s Scan on outer chain. OR Just apply Graham’s Scan to all the points since both algorithms have worst case, NlogN. This may however be slightly less optimal. (But it works :-))
Week 3
1. 2 Line Segment Intersections
See CP Algorithms for technique.
Helper functions for this include, trisign, inbetween, determinant are used.
Remember to check for ‘No Common Points’ for both determinant = 0 and not. Watch out for corner cases. (Tons of them!)
2. Polygon Intersection
Either Clipping (Sutherland Hodgman) or Line Sweep (Shamos-Hoey) could be used. For clipping, see G4G. The Algorithms are as follows,
Sutherland-Hodgman
- First choose a polygon
- Cut out 2nd polygon from first (check orientation at each line and split half-plane)
- Go through the vertices of the 2nd polygon and check if next vertices crosses the line or not. ~O(NM) time
- Also, for convex + non-convex
Shamos-Hoey (Sweep-Line Like) - (N + M) vertical lines from vertices - Obtain inner fragment at each line (inner up and inner down) - 4 lists of vertices (upper, lower) - Only for convex + convex
Within the same TC but slightly less optimal, a simpler approach using all the previous functions can be used.Simply, find all line segment intersections and check point in polygon for each vertex. Then just order points cw / ccw by sorting by angle from centroid. See D3 Mike’s ObservableHQ for an awesome visualization.
3. Intersection of Horizontal and Vertical Segments
This is briefly discussed in ‘Competitive Programming Handbook by Antti’.
Scan the the edges and classify and store as horizontal/vertical segments.
Store in start, tuples of the form
{x1, 2, vptr}for vertical segments{xmin, 1, hptr}and{xmax, 3, hptr}for horizontal segments The operations are 1(Add eventpt), 2(Intersect with vertical), 3(Remove Endpoint). Sort thestartarray, and perform a line sweep over it. Use order-statistic tree (policy-based ds) for thestatus. (or implement similar RBT using nodes)
// Horizontal Segment (height)
vector<ll> hzlevel;
// Vertical Segment (height, range)
vector<pair<ll,ll>> vlevel;
// Starting Point Tuples (xcoord, operation, index)
vector<vector<ll>> start;
// In operation 2 we check intersects like this,
lo = status.order_of_key(vlevel[ix].first);
hi = status.order_of_key(vlevel[ix].second+1);
intersects += hi - lo;
4. Intersection of Set of Segments
Classic Sweep Line for Segment Intersections
Consists (key vars)
- Event Point
- Upper (or left) Endpoint of Segment is p (U(p))
- Lower Endpoint of Segment is p (L(p))
- Intersection/Internal Point of segment is p (C(p))
- (Q) Event Queue of found event points
- (S) Set of of all Segements (Array)
- (T) Set of Status (RB Tree?)
- Event Queue set to check if already present?
- Event Point
FindIntersection(S)
- Initialize Q and T
- Push first U( p ) endpoint (and corresponding line segment/index) in Q
- While Q non-empty, HandleEventPoint
HandleEventPoint(p)
- Consists of U, L, C
- Generate L( p ) and C( p ) from adjacent segments in T
- Segments of $L(p) \cup U(p) \cup C(p) \geq 2$
- Report intersection p
- Delete L( p ) since segment ends
- Delete C( p ) to swap (2nd priority to U)
- Insert U( p )
- Insert Back C( p ) (finish swap)
- If there is no U( p ) and no C( p )
- FindEventPoints(sl, sr, p) where sl, sr are the adjacent segments of p in T
- Else
- Take leftmost segment of U( p ) union C( p ), ie (topmost priority) as sl
- Take left neighbour of sl in T, s1
- FindEventPoints(sl, s1, p) // top Segments intersections
- Take rightmost segment of $U(p) \cap C(p)$, ie (least priority) as sr
- Take right neighbour of sr in T, s2
- FindEventPoints(sr, s2, p) // bottom Segments intersections
Key Features for any Sweep Line
- Event Point (often coordinate-compressed)
- Status Set containing elements important for current event point
- Line sweeps across some direction (Obvious!)
Unfortunately, I wasn’t able to code this one up. However, geom algorithms explains with code the approach to doing this.
Week 4
1. Diagonals of any Simple Polygon
For diagonals, one technique is to first check if diagonal intersects with any other polygon line segment.
Then check if Point-in-Polygon for the midpoint, to know if it is inside/outside.
So, trisign, inbetween, semi_check_intersect, check_intersect and point_in_polygon are needed.
Note that check_intersect includes endpoints unlike semi_check_intersect.
intersect diagonal_check(vector<vertex>& poly, ll i, ll j){
int n = (int)poly.size();
// Check Intersections
for(int k = 0; k < n; ++k){
if(k == i || k == j || (k+1) % n == i || (k+1) % n == j) continue;
int res = check_intersect(poly[i], poly[j], poly[k], poly[(k+1)%n]);
if(res == 1) return crossing;
}
// Check if Midpoint in polygon. Assumption: diagonal does not intersect
pair<double, double> midd = {(poly[i].x + poly[j].x)/2.0, (poly[i].y + poly[j].y)/2.0};
if(point_in_polygon(poly, midd)){
return inner;
}else{
return outer;
}
}
2. Ear-Cutting Algorithm for Triangulation of Convex Polygons
Steps -
- Preprocess: If for every vertex, adjacent vertices form inner diagonal. Mark as Ear. ~O($N^2$ for diagonal_check)
- Start processing ears in-order from a starting vertex (Try to maintain order in which they are checked)
- Delete Current Ear Vertex from the polygon (& is_ear) vector. Insert (diagonal with adjacent verts and the pt) as a triangle.
- Check if vleft, vright is a ear (~O(N))
- Stop when ear-list is empty or polygon has less than 3 vertices (all vertices are done!)
Time: $O(N^3)$ (Sum of $N^2$ operations)
After preprocessing the ears in the is_ear array, the algorithm proceeds as follows,
// Set start point
int st = 0;
while(n > 3){
// Start loop at previous triangle endpoint
for(int j = st; j < st + n; ++j){
int i = j % n;
if(is_ear[i]){
// Find First Ear and Delete
vector<vertex> res_triangle = { poly[(i - 1 + n) % n], poly[i], poly[(i + 1) % n] };
triangles.pb(res_triangle);
is_ear.erase(is_ear.begin() + i);
poly.erase(poly.begin() + i);
// Update Polygon and check ears
n = (int)poly.size();
// Lower Vertex
is_ear[(i-1 + n) % n] = check_ear(poly, (i-1 + n) % n);
// Upper Vertex (new index -> i % n)
is_ear[i % n] = check_ear(poly, i % n);
// Set start of next iteration
st = i;
break;
}
}
}
Finally, add remaining polygon into triangles.
The check_ear functions checks diagonal_check(from 4-1) on the neighbouring vertices.
It also helps to plot testcases like this,

3. Monotone Polygon Triangulation
Triangulation of strictly y-monotone polygons. See MCS481 Slides for a pretty good psuedocode or the Book is also great.
For Diagonal check part, time complexity would be high therefore it is better to use Concavity Check with trisign instead. Remember to add diagonals from last (lowermost) vertex also. sidemap is used to store Left/Right and vertex is the merged sorted vertex list.
void triangulate_monotone(vector<point>& verts, map<point, bool> sidemap, vector<polygon>& diags){
int sz = (int)verts.size();
deque<point> rack = {verts[0], verts[1]};
for(int j = 2; j < sz-1; ++j){
point vlast = rack.back();
// Process Vertex
if(sidemap[verts[j]] != sidemap[rack.back()]){
// Opposite Sides
while((int)rack.size() > 1){
diags.pb(vector<point>{rack.back(), verts[j]});
rack.pop_back();
}
rack.pop_back();
rack.push_back(vlast);
}else{
// Same Side
rack.pop_back();
// rack.back() should be inward wrt. vlast and verts[j] -> i.e, match sign of side of vlast
while(rack.size() && check_concave(vlast, rack.back(), verts[j], sidemap[verts[j]])){
diags.pb({verts[j], rack.back()});
vlast = rack.back();
rack.pop_back();
}
rack.push_back(vlast);
}
rack.push_back(verts[j]);
}
// Add diags from all verts in stack (except top and bottom) to lowermost vertex
rack.pop_front();
rack.pop_back();
for(auto v: rack){
diags.push_back(vector<point>{verts[sz-1], v});
}
}
4. Number of Triangulations of a Convex Polygon
- From the wikipedia page, A convex polygon with n + 2 sides can be triangulated to n triangles by non-crossing lines.
- Number of different ways of triangulation is Catalan Nos.
- For any triangulation, there would be exactly 2 vertices that don’t need to be joined by a diagonal.(or whose degrees stay the same!) So, catalan nos. is on the $n-2$ vertices connected by diagonals.
- The $\sum c_i c_{n-i}$ Form: Recurrence relation is the breaking of the polygons by one of the diagonals.
Week 5
k-D Trees
- Base Structure: BST
- Stores values like BST, but instead of ordering only by value like BST, it needs to order by
kparams. - This is done by selecting a splitting criteria, like for 2D: alternate between ‘X’ and ‘Y’ parameters based on whether the depth is even/odd.
2D Layered Range Trees
- Base Structure: Red-Black Tree or balanced BST
- See differences between some well-known trees.
- 2D Layered Range tree stores points in its associated array, and optimized for “which points fall within a given interval” queries.
- The assoc array of point
vis the two-pointer zip (merge-sort) of2vand2v+1vertices. - It can be represented similar to 2D segment tree, but value contains “the points themselves”. (segtree consists of sum of no. of points)
- Both 2D layering range tree and segment trees can be used interchangeably.
- Fractional Cascading is technique to store binary_searched index of the element as pointer. So $O(logN)$ extra factor isn’t needed. Each element of assoc array of point
valso contains pointers to2vand2v+1nodes arrays’ binary_searched(lower_bound) index.
2D Priority Search Tree
- Base Structure: Binary Heap or Priority Queue (Scaled up to 2D).
- Shows one-sided unbounded range of values.
1. Closest Point
Simple binary-search implementation as points have only 1 parameter.
2. Number of Points in Rectangle
The easiest implementation in via a Cartesian Tree. (similar to Kdtree) My code is a 2D Segment Tree however I recommend using an OOP approach with Cartesian Tree instead!
This is was approximate workflow while designing 2D Segment Tree. See CP Algorithms’s compression of 2D segment tree for ideas. Fractional Cascading for speeding up!
Below are the design notes for the code.
General Design -
- buildx, buildy, queryx, queryy
- Range compression (See cp-algorithms.com tips)
- NlogN memory and (logN)^2 time per query
Construction -
- Vector with all x-coords sorted
- Vector with all y-coords sorted for each node of segtree[x] to lowerbound/upperbound y indices
- Within each node of segtree[x], store `segtree[][y]` with compressed size 4*log(Sumx_r - Sumx_l)
Query -
- Search equivalent indices for x-coords in vec
- Get each node from segtree query
- Search equivalent indices for y-coords in each vvec[v_x]
- Get each node sumval from segtree[v_x] query
Variable Names-
- v -> root vertex
- l, r -> current left/right segment of coords
- L, R -> required left/right segment
- Lyc, Ryc -> c indicates coordinate and not index
Current Progress -
- Correct Answer and correct Memory Limit
- Time Limit Exceeded in Building Segtree
- Building Time: ~ 4min 45 seconds
- Query Time(for 30000 queries): ~ 5min (9 min 45s in total)
Optimization -
- Get rid of binary search for both x & y and instead check coord value
- Remove coord compression but keep construct_order_y
- Make D&C of segment tree run on array with unique elements (order_x, order_y) instead
- Fractional Cascading:
- Store relation(starts) between unique array (order_x) and points
- So, construct_order_y does not require to binary search index (remove extra logN factor)
The Segment Tree is built on the unique x-coordiniates (order_x) array and 2nd dimension in unique y-coordinates (order_y).
It assumes that points do not repeat!
CTags-like Overview of global variables,
const ll SZX = 30001;
const ll INF = 1.5e9;
// Segment Tree : 4*SZX and 4*SZY (still only NlogN memory since dynamic length arrays!)
vector<ll> segtree[4*SZX];
// Unique x-coordinates of points
vector<ll> order_x;
// Unique Y-coordinates of (vx)th segment tree (4*SZX and SZY)
vector<ll> order_y[4*SZX];
// List of all points in sorted x-coordinate order
vector<pair<ll, ll>> points;
// Fractional-Cascading like map of unique x indices of order_x to non-unique coordinates' indices in points
ll starts[SZX];
Overview of Functions,
// Query the (vx)th segment tree
ll queryy(ll vx, ll vy, ll ly, ll ry, ll Lyc, ll Ryc);
// Build (vx)th segment tree on the basis of y-coords (USES queryy for 2*vx, 2*vx+1 segment tree values)
void buildy(ll vx, ll lx, ll rx, ll vy, ll ly, ll ry);
// Construct the base array for the (vx)th segment tree (Called within buildx)
size_t construct_order_y(ll vx, ll lx, ll rx);
// Builds the segment tree and proceeds to call construct_order_y and buildy
void buildx(ll vx, ll lx, ll rx);
// Query the x-coordinate and proceed to call queryy
ll queryx(ll vx, ll lx, ll rx, ll Lxc, ll Rxc, ll Lyc, ll Ryc);
The start array is constructed in preprocessing stage before buildx.
construct_order_y uses start array for copying y-coords of original array (so no logN factor from lower_bound).
Building: buildx -> construct_order_y -> buildy -> (either fill value 1 or queryy)
Query: Format input to lower/upper endpoints -> queryx -> queryy
At both queryx and queryy(similar but with lxy rxy),
ll lxc = order_x[lx], rxc = order_x[rx];
line is used. The lxc rxc (coordinates of query points) are used for all comparisons except for calculation of midpoint where lx rx (positions) are used.
3. Closest Pair of Points
K-D Tree Implementation. See Rosetta Code or Stanford ACM’s Notebook. For intuition on K-D Trees see Josh Hug’s lectures General Parameters that can be tuned,
- Distance Metric
- Euclidean Metric
- Chessboard Metric (Used for this problem)
- Manhattan Metric
- Splitting Criteria (X or Y based)
- Parity of Depth/Height of current node
- Larger of Width or Height of bounding box of current node
Week 6 - Point Location and Trapezoid Maps
Lec 1 - “Where the hell am I?”
- Planar Subdivision: A set of polygons that form a large polygon.(Like a map of states of a country)
- Partition into vertical lines or slabs at every vertex (like Shamos Hoey)
- Naive Implementation
- Query: Traverse two binary search trees - find vertical lines (bound on x), find region (bound on y);
- Space Complexity can be n^2 if two full BST
Lec 2 - Decreasing Space Complexity
- Refinement: The Partition of Planar Subdivision S into Slabs induced by vertices. These Partitions would be trapezoids (or degenerate ones).
- Trapezoidal Map: Splits the trapezoids of a refinement. Very useful technique for space partitioning or mapping regions in general.
- Unlike the previous partition by vertical lines, this partition only has lines that end at another edge or outer rectangle.
- Side: Segment of max length contained in boundary of face of trapezoid
- Trapezoidal partition with $n$ segments have, $T(S) \leq 2n + 2*2n + 4$(segment endpoints, vertical lines, boundary rectangle) vertices and trapezois $\leq 3n + 1$
- Constructing Trapezoid - Find each up, down left, right endpoints for each trapezoid. Time: 3N + 1 = O(N)
Below is an image of a trapezoidal map of ’line segments’ from this GAS, the same can be done for polygons as well.

Lec 3 - Randomized-Incremental Algorithm:
- O(NlogN) expected preprocess time
- O(logN) query time (not worst case optimal but randomized)
- Expected Query Time by Backward Analysis (See Lec04 of series)
Lec 4 - Data Structure Trapezoid Cartesian DAG
- Trapezoidal Map Data Structure For 2D: Cartesian D.A.G.
- Make sure to split Trapezoid on map (so it isn’t n^2 time)
- Unlike Tree, Cartesian DAG will just have pointer to that trapezoid
Lec 5 - Query Time for Trapezoid Cartesian DAG
- LogN Query time (Amortized)
- Backward Analysis (summation 1/i)
- Size: O(N + 13N) = O(N) (13N comes from $\sum(3i + 1)*(4/i)$)
- Construction: NlogN
Week 7 - Voronoi Diagrams & Post Office Problem
Lec 1 - Post Office Problem
- Post Office Problem: Which is the closest Post Office to place P?
- Answer: Voronoi Diagram with Euclidean Distance Metric. (Map of region closest to that point)
Lec 2 - Definitions in Voronoi Diagrams
- Voronoi Cell: $$ V(p) = { x \in R^2: d(x, p) < d(x, q) \forall q \in P\ - {p}} $$
- For Voronoi Cell, Think of definition of Ball in Topology but using relative distances instead of a constant epsilon
- Voronoi Edge: $$ V(p) = { x \in R^2: d(x, p) == d(x, q) \forall q \in P\ - {p}} $$
Lec 3 - Overall Shape of Voronoi Diagrams
- Lemma: Vor( P ) consists of atmost (2n - 5) vertices and (3n - 6) edges
- Proof of Lemma from Euler’s Polyhedra Formula (Dual is Delaunay Triangulation and Maximal Planar Graph => 3n - 6)
- For infinite voronoi diagrams, set dummy vertex at infinity
- NOTE: Voronoi Vertices != Voronoi Cells (or Faces or Sites)
- Voronoi Vertex: Circle at vertex ‘x’ has atleast 3 points on it’s largest (circumcircle which does not contain a site/face) $$|C_p(x) \cap P| \geq 3$$
- Voronoi Edge: For edge P to P’, there is a vertex ‘x’ which has P and P’ on it’s largest (circumcircle which does not contain a site/face) $$\exists x \in E(P, P’) st.,\ \ |C_p(x) \cap P| = {P, P’}$$
Lec 4 - Computing Voronoi Diagram
- BF: Line Segment Intersection, Half Plane Intersections > $O(N^2)$ time
- Naive Line Sweep: Event Points are not known before swept
- Fortune’s Algorithm or Optimized Line Sweep:
- Parabolas at the visited vertices form the equidistant line
- Directrix is the Line Sweep at point P, and focus is the visited vertices
- Beachline($\beta$): The lowerbound of each of the parabolas (from the visited vertices so far) merged together.
- The intersection points of the parabolas as the line is swept form the edges of the voronoi diagram.
- See this for demo. Also, this post for explaination.
- Beachline Event Points
- Site(Face) Event: New Sitepoint is found => New Arc is created
- Circle Event: Sweep Line reaches lowest point of circle containing 3 Site Points => Arc of the inner site point is deleted. Voronoi Points are the centre of the circle formed.
Lec 5 - Fortune’s Line Sweep Algorithm
- See PVigier’s Blog for implementation resources.
- Also see this post by Jacques
- Key Functions
- Find New Circle Event Points (Site Event Points are already known)
- Handle Circle Event (once processed; calls findNewCircleEvent)
- Handle Site Event (once processed; calls findNewCircleEvent)

Week 8 - Delaunay Triangulations
Lec 1 - Height Interpolation
- Triangulation: Planar subdivision with all inner faces triangles and outer face is Convex Hull
- Since Maximal Planar Graph => (3n - 6) edges. But outer face is CH and needs triangulation (3 - h) edges => 3n - 3 + h edges in total
Lec 2 - Angle-Optimal Triangulation
- Height Interpolation Optimization by choosing a better triangulation
- Angle-Optimal Triangulation to avoid skinny triangles (this causes disparity in length Vs width - based height interpolations)
- Angle vector $A(T)$ of Triangulation $T$ is the angles of all triangles in sorted order
- A Triangulation is more optimum if Angle vector is lexicographically better than the other. i.e., $A(T_{optimal}) > A(T)$
- The best triangulations are called Angle-Optimal.
Lec 3 - Edge-Flips & Legal Triangulations
- Edge e is illegal in Triangulation T if triangulation obtained by flipping edge e, T’ has $A(T’) > A(T)$
- Use Extended Thales Thm (Thales++), i.e., check angles by taking circumcircle around edge e
- Angle-Optimal is always legal.
- A triangle is legal iff it has no illegal edge
Lec 4 - Voronoi Diagram & Delaunay Triangulation
- Delaunay Triangulation: Straight Line Drawing of the Dual Graph of Voronoi Diagram
- Proof
- Take circumcircle on any point in edge between sites p-q in Vor(P)
- Consider another edge u-v and show crosses lead to contradiction
- Alt Definition: Delauanay Triangulation iff $\forall \Delta \in T : int(C(\Delta) \cap P) = \phi$
- AKA: Empty Circumcircle property of D.T.
Lec 5 - Correctness and Computation
- A triangulation is legal iff it is Delaunay
- Proof
- Back Relation: By Empty Circumcircle Property and Thales++, D.T. is legal
- Forward Relation:
- By Contradiction, Take a triangle p-q-r and circumcircle. where T is legal
- Take point s in circumcircle. Now, we need to maximize angle of chord at s. (p-s-q)
- Take neighbouring triangle p-q-t, t lies outside circumcircle.
- Get contradiction: angle q-s-t > angle p-s-q (but this is maximal)
- If pointset P is general position(i.e. No 4 points lie on an empty circle) then D.T. is unique and angle-optimal.
- If pointset P is not general position, then all D.T. have same minimum angle but may not be angle-optimal.
- D.T. can be constructed in $O(NlogN)$
- Angle-Optimal Triangulation in non-general position P, can be constructed in $O(N^2)$ time. Holes (4+ points on empty circle) can be filled by trying out each flip.
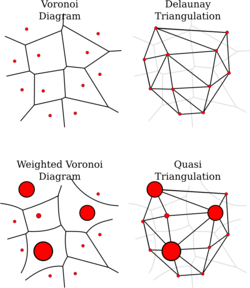
Below is an image also showing weighted voronoi diagrams and their corresponding delaunay triangulations,
Week 9 - Convex Hull in 3D
Lec 1 - Complexity and Visibility of CH
- (Upper Bound Theorem) General Time Complexity of Convex Hull in d dimensions: $O(N^{\lfloor d/2 \rfloor})$
- In 3D, Surface of the Polyhedra forms a Planar Dual Graph => atmost (3n-6) edges and hence linear complexity. Similar for higher dimensions.
- Construction by Random-Incremental Algorithm
- Visibility:
- If we project rays from point P to Convex Polytope.
- The project rays that are 3D Tangent to the polytope form a ring/shadow, the point that form this is called Horizon.(Last visible edges)
- Region facing towards P bounded by Horizon is the Visible region.
- Define Conflict Graph and create bipartite relation of points with facets. And mark out which facets are visible.
Lec 2 - Randomized Incremental Algorithm
- Pseudocode/Approach of adding vertex to CH3
- TC: $O(N^2)$ (Randomized from $O(N^3)$; not worst case optimal)
Lec 3- Analysis
- Expected No. of Facets Created by CH are bounded to atmost (6n - 20)
- Degree bounded by 6 for the vertices other than initial 4-point CH3, so 6*(n-4) + 4
- See this Tutorial on 3D CH for simple implementation as well as some optimized version.
- Can be further optimized with Configuration Spaces
- Higher Degree CH are worst case optimal accordingly with Upper Bound Thm.
Lec 4- Convex Hull & Half-Plane Intersections
- Assume a mapping/relation from spaces P1 and P2, where (‘primal is the dual of the dual!’)
- Line in P1 -> point in P2 (P1 is Dual of P2)
- Line in P2 -> line in P1 (P2 is Dual of P1)
- Convex Hull of a point set in P1 => Set of Lines in P2
- Traversing the lines corresponding to Lower Hull of P1 alongside intersections, give the Upper Envelope. Similarly for Upper CH.
- Incidence Preserving: Every point in P1 gives Line in P2. So CH region gives area bounded by upper and lower envelope.
- Order Preserving: Maintains an ordering through the mapping.
- Scaling to 3D: CH3 of points gives 3D Wrapping/Envelope of 3D Lines
Lec 5- Voronoi Diagrams Revisited
- Distance to Unit Parabola (From Projection of point q to tangent at p’) = intercepts $(pq)^2$
- Take: A (set of planes/halfplanes) have an Upper Envelope (or Supremum or Least Upper Bound 3D Parabola). The planes are thus 3D Tangents to the 3D Parabola or Envelope.
- When this is projected to the plane,
- Voronoi Centres/Faces/Sites = (Intersection points of Planes and 3D Parabola)
- Voronoi Edges = (Line Segments that for the Intersection of Planes)
- Voronoi Vertices = (Intersection of 3 or more Planes)
- Take: 3D Convex Hull of (Intersection of Planes and 3D Parabola). The 3D Parabola is now the Lower Envelope (or Infimum or Greatest Lower Bound) of the (3D Convex Hull).
- When this projected to the plane,
- Delaunay Vertices = (Intersection of Planes and 3D Parabola) or (Points of 3D Convex Hull)
- Delaunay Edges = (Edges of 3D Convex Hull)
- See Video for Demo
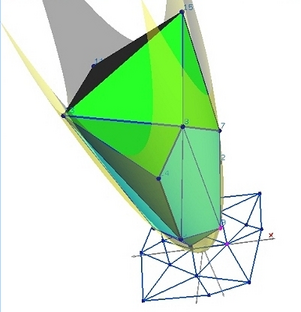
Below image is from DesignMentor, showing delaunay triangulation as a projection of a 3D Convex Hull
Week 10 - Motion Planning
Lec 1 - Point Shaped Robots
- Trapezoidal Map for Path with Obstacles. Finding Path: O(NlogN) Construction and O(N) query
Lec 2 - Configuration Space
- Degrees of Freedom: 2D(2 translation x, y + 1 rotation \theta) = 3, 3D(3 translation x,y,z + 2 rotation $\theta, \phi$) = 5
- Configuration Polygon: Polygon s.t. foreach point in ConfPol, Robot at point (x, y) (R(x, y)) intersects with obstacle polygon(Pi). (If point robot, then this is just the obstacle polygons.)
$$ CPi = {(x, y): R(x, y) \cap P{i}} $$
Lec 3 - Characterizing Configuration Spaces
- Minkowski’s Sum (For Polygon!): $S_1+S_2={p + q : \forall p \in P, q \in Q}$ where p, q are point vectors
- Geometric Representation: Replace Copy of S1 in every point of S2 to form the new shape. (or Vice versa; commutative)
- Inversion in Polygon Algebra: Rotate polygon by 180 around origin. $S2 =-S1={-p : \forall p \in P}$
- Configuration Polygon: $CP = P + (- R(0, 0))$ (where ‘+’ is minkowski sum)

Lec 4 - Complexity and Computation
- Atmost n+m edges in minkowski sum(S) of P (n edges) and Q (m edges)
- We can define a map of each edge of S to a pair (i, j) of the edges in P, Q.
- Quadratic Algorithm: Convex Hull of points where at each corner of P, Try every rotation of Q
- Linear Algorithm: (Two-Pointers-like) Choose Bottom-Right most point for both. And move p_ptr or q_ptr based on which has a smaller angle.
Lec 5 - Pseudodisks
- Def: Pair of Planar Objects (P1, P2) form a pseudodisk if (bound-> boundary, int->interior),
- $bound(O1) \cap int(O2)$ is connected
- $bound(O2) \cap int(O1)$ is connected
- Consider 2 convex polygons with disjoint interiors.
- Let d1 -> direcion where P1 more extreme, similarly d2.
- Then P1 is more extreme in [d1, d2] or [d2, d1]. Or in a circle, one boundary part has P1 more extreme and other with P2.
- For P1, P2, take CP1 = P1 + R, CP2 = P2 + R. Then proof by contradiction. So (CP1, CP2) have to be pseudodisks.
Lec 6 - Union Complexity
- For Convex Polygons P, Q, R,.., the total union has atmost 2*(n+m+l+..) vertices. (since every (two or less) crossings can be mapped to a vertex)
- For constant complexity convex robot R, translating among S disjoint objects with N edges. We can preprocess in $O(N (logN)^2)$ and compute collision-free path in O(N)
- Approach
- Triangulate Polygons if Not-Convex to make it convex (NlogN)
- Compute ConfPol for each Obstacle Polygon (N)
- Compute Union of Obstacles by sweep line (N $(logN)^2$)
- Mark out Trapezoidal Maps etc.
- Query: Find path in complement of unionConfPol with help of Trapezoidal Map